PAD
PAD(Piezo actuator Drive)プロトタイプ
ピエゾの直線的な動きを、強力かつ正確に制御可能な回転運動に変換

PADの利点
![[check]](image/face/check.png) 高精度
高精度
高い動特性
システムの簡素化
計測技術
電磁干渉なし
1. 電磁モーターの限界の克服
産業、医学、そして、ロボットの応用分野では、反力を感じながら制御できる、強力、正確かつ小型の電動機はますます重要になっています。
近年、要求が益々複雑になり、エンコーダ、ギアボックス、センサ、エレクトロニクス、そしてメンテナンスのハイレベルな統合が必須であるメカ二カルシステムソリューションが強く求められています。
これらの要望は、ピエゾドライブの持つスマート・センサ/アクチュエータの特性を利用することによって、従来の電磁モータードライブの限界のいくつかを克服することができます。
さらに、直動式であるため一般的に必要とされるギアボックスを必要としません。このように、重さ、サイズ、複雑なシステムを劇的に減少させることができます。
2. オープンループでも同期できる
オープンループ制御であっても、ロボットのアプリケーションに完全に同期した連動が可能です。
次のデルタ-3ロボットをご覧ください。
一般的な制御システムは、3つの全てのモーターの同期をとりながら正確で効率的にステージを制御します。
PADを用いたデルタ-3ロボットは、非常に高い分解能だけではなく、高精度な位置再現性も実現します。
3. 特徴
ピエゾ素材と革新的な設計のピエゾアクチュエータドライブによって、精度、動的能力、トルクと荷重検出、および拡張性について多くの優位性を有しています。
さらに、PADは高い磁場、放射、真空及び高温等の厳しい条件下で動作できます。
4. 精度
・ 位置決め精度と繰返し位置決め精度(<2 arc seconds) エンコーダ・デコーダ無し
・ ギアボックス無し=バックラッシュ無し
・ オーバーシュート無し
5. 動的性能
・ 低慣性のため、急加速・急減速(ブレーキ無し)が可能
・ 低速かつ高精度な動作が可能 (0 to 60 rpm)
・ 負荷に依存しない回転速度
6. トルク/荷重センシング
・ スマートロードセンシング (トルクセンサー無し)
・ 高トルク ( 標準5[N/m]、ギアボックス無し)
・ オーバーロードプロテクション
7. 拡張性
・ スピード/トルク、パワーの拡張性
・ 複数PADの同期使用が可能
8. その他
・ 停止状態では(負荷あり)、電力消費はゼロ
・ 高電磁界、放射線、超高真空でも機能に影響なし
・ 漂遊磁界なし
9. モーター仕様
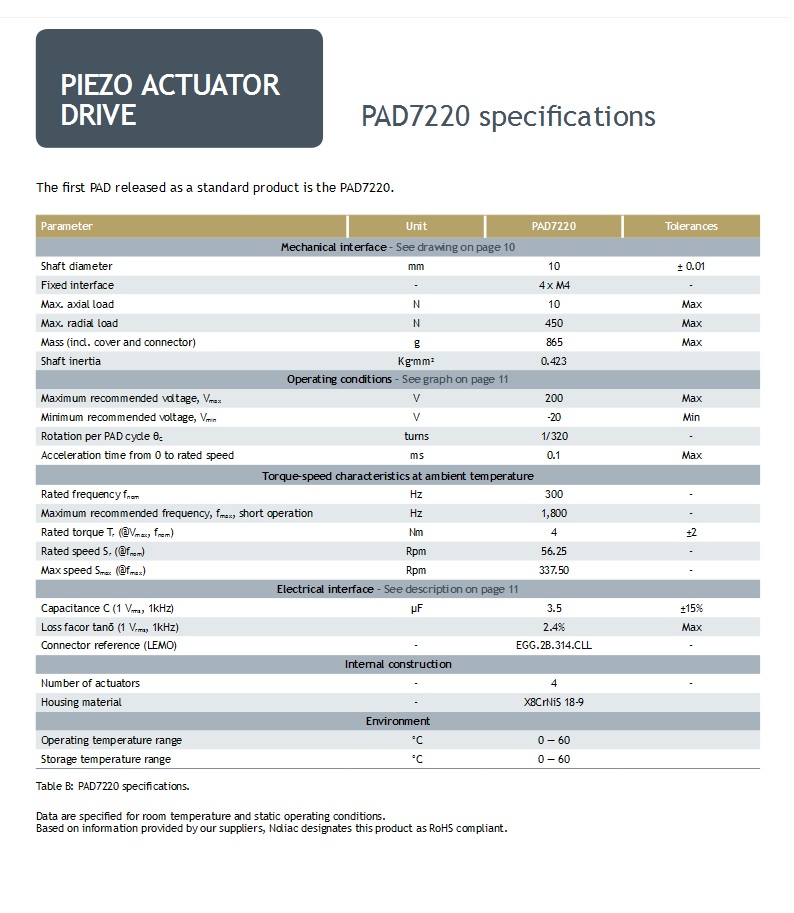
PAD7220
PAD7220諸元
PAD7220寸法図
PAD7220
PAD7344

10. ドライバー仕様
・ NDR8210 は、PAD7220に適合します
NDR8210諸元
・ NDR8310 は、PAD7344に適合します
NDR8310諸元
")
")





{kind=link}
{kind=link}